Credit de imagine: CMU
Expedițiile actuale de pe Marte ridică posibilitatea atrăgătoare a faptului că poate exista viață undeva pe planeta roșie. Dar cum o vor găsi misiunile viitoare? Un sistem dezvoltat de oamenii de știință Carnegie Mellon ar putea oferi răspunsul.
La cea de-a 36-a Conferință științifică lunară și planetară de la Houston, săptămâna aceasta (14-18 martie), savantul Carnegie Mellon, Alan Wagoner, prezintă rezultatele performanțelor recente ale sistemului de detectare a vieții în deșertul Atacama din Chile, unde a găsit licheni și colonii bacteriene în creștere. Acest lucru marchează pentru prima dată când o tehnologie automatizată bazată pe rover a fost utilizată pentru a identifica viața în această regiune aspră, care servește ca un pat de test pentru tehnologie care ar putea fi implementată în viitoarele misiuni ale Marte.
„Sistemul nostru de detectare a vieții a funcționat foarte bine, iar ceva în genul acesta ar putea permite roboților să își caute viața pe Marte”, spune Wagoner, membru al echipei de proiect „Viața în Atacama” și director al Molecular Biosensor and Imaging Center la Carnegie Mellon's Mellon College of Science.
Sezonul pe teren „Viața în Atacama” 2004 - din august până la jumătatea lunii octombrie - a fost a doua fază a unui program de trei ani al cărui obiectiv este să înțeleagă modul în care viața poate fi detectată de un rover controlat de o echipă științifică de la distanță. . Proiectul face parte din Programul de știință și tehnologie al Astrobiologiei NASA pentru explorarea planetelor sau ASTEP, care se concentrează pe împingerea limitelor tehnologiei în medii dure.
David Wettergreen, profesor de cercetare asociat în Institutul de Robotică Carnegie Mellon, conduce dezvoltarea roverilor și investigarea pe teren. Nathalie Cabrol, o savantă planetară la NASA Ames Research Center și la Institutul SETI, conduce ancheta științifică.
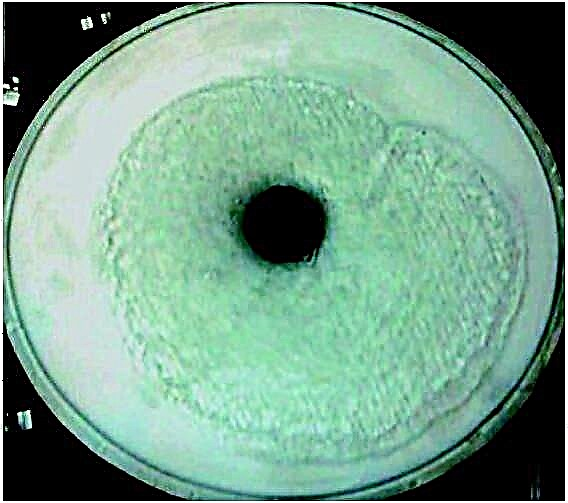
Viața este abia detectabilă în majoritatea zonelor Atacama, dar instrumentele roverului au putut detecta licheni și colonii bacteriene în două zone: o regiune de coastă cu un climat mai umed și o regiune interioară, foarte aridă, mai puțin ospitalieră pentru viață.
Am văzut semnale foarte clare de la clorofilă, ADN și proteine. Și am putut identifica vizual materialele biologice dintr-o imagine standard capturată de rover ”, spune Wagoner.
„Luate împreună, aceste patru dovezi sunt indicatori puternici ai vieții. Acum, concluziile noastre sunt confirmate în laborator. Probele colectate în Atacama au fost examinate, iar oamenii de știință au descoperit că acestea conțineau viață. Lichenele și bacteriile din eșantioane cresc și așteaptă analize. ”
Wagoner și colegii săi au conceput un sistem de detectare a vieții echipat pentru a detecta semnale de fluorescență din forme de viață rare, inclusiv cele care au doar dimensiuni de milimetri. Imaginea lor de fluorescență, care se află sub rover, detectează semnale din viața pe bază de clorofilă, cum ar fi cianobacteriile în licheni și semnale fluorescente dintr-un set de coloranți proiectat să se aprindă doar atunci când se leagă de acid nucleic, proteină, lipide sau carbohidrați. toate moleculele vieții.
„Nu știm alte metode la distanță, capabile atât să detecteze niveluri scăzute de microorganisme, cât și să vizualizeze niveluri ridicate încorporate ca biofilme sau colonii”, spune Gregory Fisher, om de știință al imaginii proiectului.
„Imaginea noastră fluorescentă este primul sistem de imagini care funcționează în lumina zilei, în umbra roverului. Rover-ul folosește energia solară pentru a funcționa, astfel încât trebuie să călătorească în timpul zilei. De multe ori, imaginile pe care le surprindem pot dezvălui doar un semnal slab. Orice lumina soarelui care se scurge la camera unui imagist cu fluorescență convențională ar întuneca semnalul ”, spune Wagoner.
„Pentru a evita această problemă, am conceput sistemul nostru pentru a excita coloranții cu sclipiri de intensitate ridicată. Aparatul foto nu se deschide decât în timpul acelor sclipiri, așa că suntem capabili să surprindem un semnal puternic de fluorescență în timpul explorării în timpul zilei ”, spune Shmuel Weinstein, manager de proiect.
În timpul misiunii, o echipă științifică la distanță situată în Pittsburgh a instruit operațiunile roverului. O echipă de la fața locului a colectat eșantioane studiate de către rover pentru a aduce înapoi examinări ulterioare în laborator. Într-o zi obișnuită pe teren, roverul a urmat o cale desemnată ziua precedentă de echipa de științe a operațiunilor la distanță. Roverul s-a oprit din când în când pentru a efectua o inspecție detaliată a suprafeței, creând eficient o „matlasare macroscopică” de date geologice și biologice în panouri selectate de 10 la 10 centimetri. După ce roverul a plecat dintr-o regiune, echipa de la sol a colectat probe examinate de rover.
„Pe baza descoperirilor roverului în teren și a testelor noastre în laborator, nu există niciun exemplu de rover care să ofere un fals pozitiv. Fiecare probă pe care am testat-o avea bacterii în ea ”, spune Edwin Minkley, directorul Centrului pentru Biotehnologie și Procese de Mediu din Departamentul de Științe Biologice.
Minkley efectuează analize pentru a determina caracteristicile genetice ale bacteriilor recuperate pentru a identifica diferitele specii microbiene prezente în probe. El testează, de asemenea, sensibilitatea bacteriilor la radiațiile ultraviolete (UV). O ipoteză este că bacteriile pot avea o rezistență la UV mai mare, deoarece sunt expuse radiațiilor UV extreme în mediul deșert. Potrivit lui Minkley, această caracterizare poate explica și de ce o proporție atât de mare din bacteriile de pe cel mai arid sit sunt pigmentate „roșii, galbene sau roz” pe măsură ce cresc în laborator.
Prima fază a proiectului a început în 2003, când un robot cu energie solară, numit Hyperion, dezvoltat și la Carnegie Mellon, a fost dus la Atacama ca un test de cercetare. Oamenii de știință au efectuat experimente cu Hyperion pentru a determina designul, software-ul și instrumentația optime pentru un robot care ar fi utilizat în experimente mai ample, efectuate în 2004 și în 2005. Zo ?, rover-ul folosit în sezonul de câmp 2004, este rezultatul acelei munci. . În ultimul an al proiectului, planurile apelează la Zo ?, echipat cu o gamă completă de instrumente, care să funcționeze autonom, deoarece parcurge 50 de kilometri pe o perioadă de două luni.
Echipa științifică, condusă de Cabrol, este formată din geologi și biologi care studiază atât Pământul, cât și Marte la instituții, inclusiv Centrul de cercetare Ames al NASA și Centrul Spațial Johnson, Institutul SETI, Jet Propulsion Laboratory, Universitatea din Tennessee, Carnegie Mellon, Universitatea Catolica del Norte (Chile), Universitatea din Arizona, UCLA, British Antarctic Survey și Școala Internațională de Cercetare a Științelor Planetare (Pescara, Italia).
Proiectul Viața în Atacama este finanțat cu o subvenție de 3 ani de 3 ani de la NASA către Institutul de Robotică Carnegie Mellon. William "Red" Whittaker este investigatorul principal. Wagoner este investigatorul principal pentru proiectul însoțitor al instrumentelor de detectare a vieții, care a obținut o subvenție separată de 900.000 USD de la NASA.
Sursa originală: Comunicat de presă CMU